Intercepting a Simulated UAV with a Quadrotor Using Sliding Mode Control
Robotics ·Overview
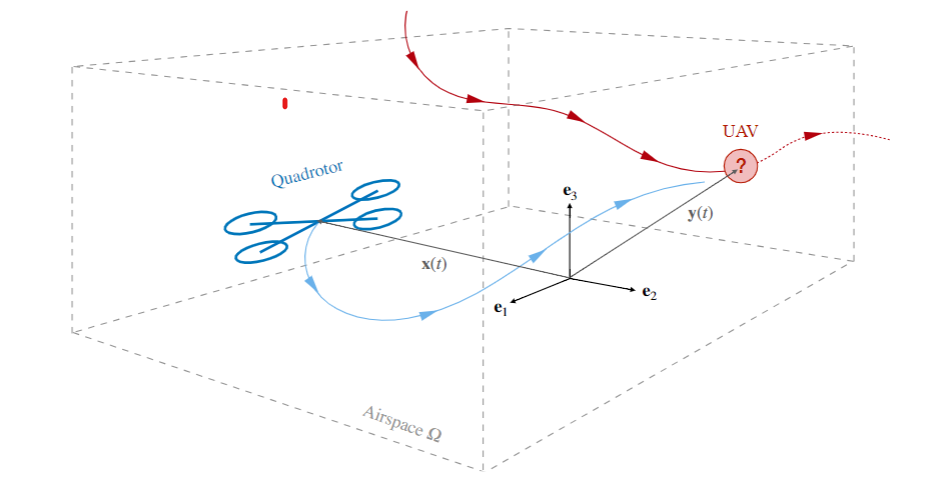
As part of the “Nonlinear Control of Robotic Systems” course at WPI, our team developed and simulated a quadrotor control system capable of autonomously intercepting a UAV within a bounded airspace. We designed a Sliding Mode Controller (SMC) to regulate the quadrotor’s altitude, roll, and pitch, while predicting the UAV’s future trajectory to improve interception accuracy.
Problem
The challenge was to ensure a quadrotor could track, intercept, and return with an intruding UAV in a 10×10×10 m airspace. The vehicle had to autonomously detect the target’s position, predict its motion, and perform interception while maintaining stability even under disturbances introduced during capture.
To meet this goal, we restricted yaw control and focused on the remaining three axes. The underactuated nature of the quadrotor made the control problem particularly interesting — we could only directly control four of the six degrees of freedom.
Solution
We modeled the quadrotor dynamics and derived individual SMC laws for altitude and orientation control. Sliding Mode Control was chosen for its robustness against modeling uncertainties and disturbances. The control law was divided into two components:
- Sliding phase, ensuring stable convergence, and
- Reaching phase, managing the approach to the sliding surface while mitigating chattering.
To guide the quadrotor toward the UAV, we implemented trajectory prediction using a simple numerical approach: fitting a parabola through recent UAV positions to estimate future velocity and acceleration. The quadrotor then used these predicted states as targets for interception.
A state machine managed the mission flow:
- Follow UAV – track the predicted path
- Capture – close in within 0.1 m
- Stabilize – maintain steady hover after capture
- Return – navigate back to the home nest
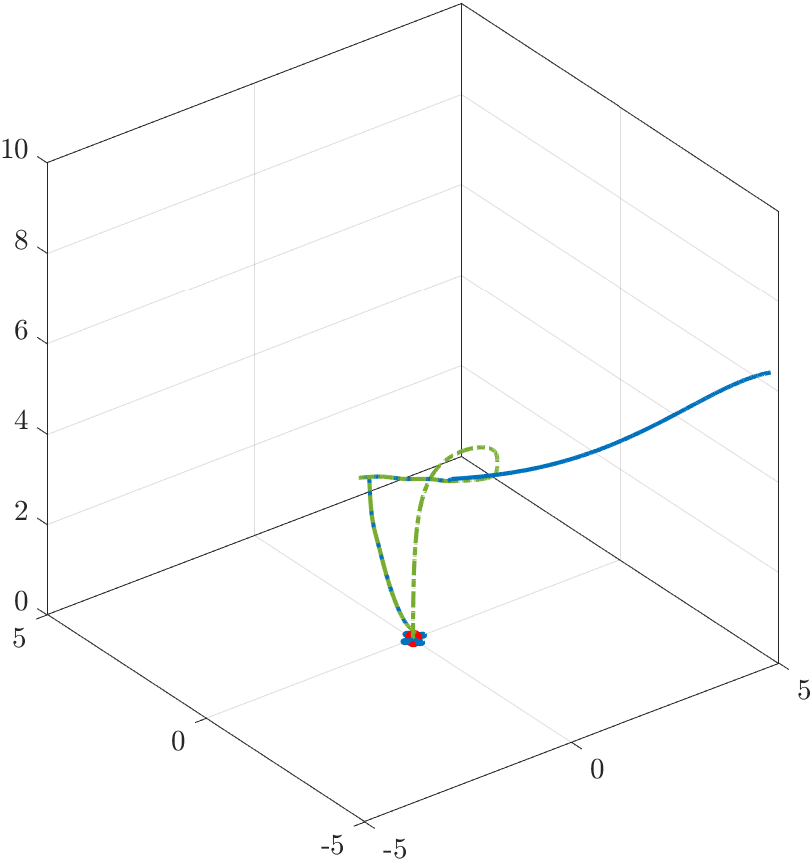
The simulation validated successful interception and return behavior, with clear trajectory tracking and stable performance prior to the capture disturbance phase.
What I Learned
This project deepened my understanding of nonlinear control systems, especially in handling underactuated aerial vehicles. Designing the SMC and trajectory prediction taught me how small modeling and tuning details can significantly affect system stability. While the simulation succeeded in interception, it also highlighted how difficult it is to maintain post-capture stability — an area I’d like to explore further through improved tuning and disturbance rejection strategies.
You can view our code and simulation results here: